本网讯(通讯员 于澄嵩 卢俊杰)近日,电气信息学院在智能理疗机器人领域取得研究进展。2023级硕士研究生于澄嵩(导师:黄自鑫)在中科院一区Top期刊《Engineering Applications of Artificial Intelligence》上发表学术论文“Inverse compensation and adaptivefuzzy integral sliding-mode control for the underactuated soft massage physiotherapy robot”;2024级硕士研究生卢俊杰(导师:黄自鑫)在中国科协A类期刊《机器人》上发表学术论文“受植物启发的变刚度理疗执行器设计与分析”。
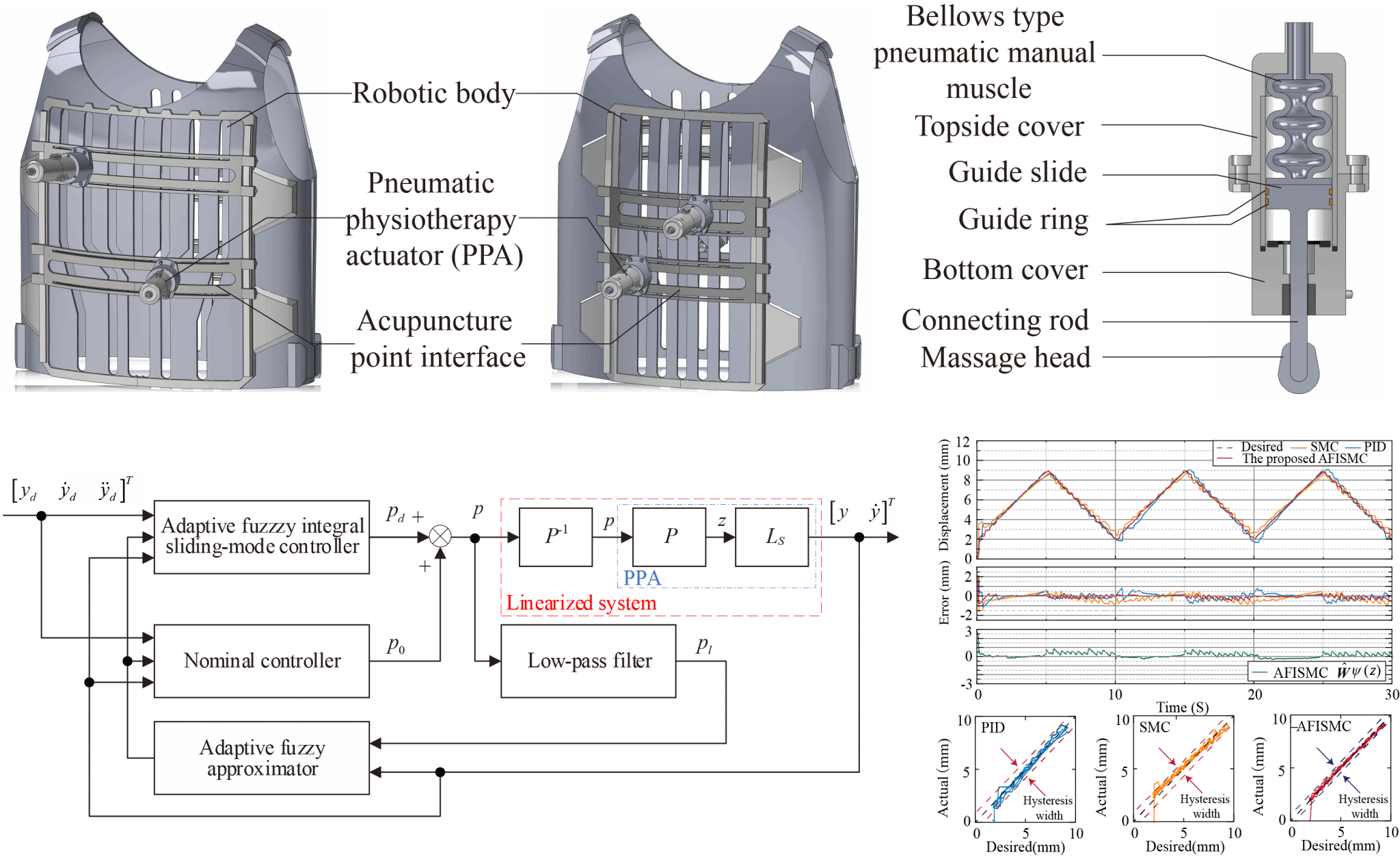
《Engineering Applications of Artificial Intelligence》是Elsevier旗下人工智能工程应用领域的重要学术期刊,具有较高学术影响力。该期刊重点报道人工智能方法在工程问题中的创新应用,涵盖智能控制与优化、机器人与自主系统、复杂工程系统建模与仿真,以及人工智能与传统工程理论的融合研究等方向,强调理论方法的工程可实现性与实际应用价值。研究成果《Inverse compensation and adaptive fuzzy integral sliding-mode control for the underactuated soft massage physiotherapy robot》针对气动理疗机器人中由材料特性和气体可压缩性引起的复杂迟滞效应,构建并辨识了系统的动态模型,提出了一种迟滞补偿与自适应模糊积分滑模相结合的控制方法,实现了系统的近似线性化与高精度控制。该方法能够有效抑制外部干扰和参数不确定性,通过理论分析证明了系统的稳定性,并通过仿真与实物实验验证了其在控制精度和跟踪性能方面的有效性。
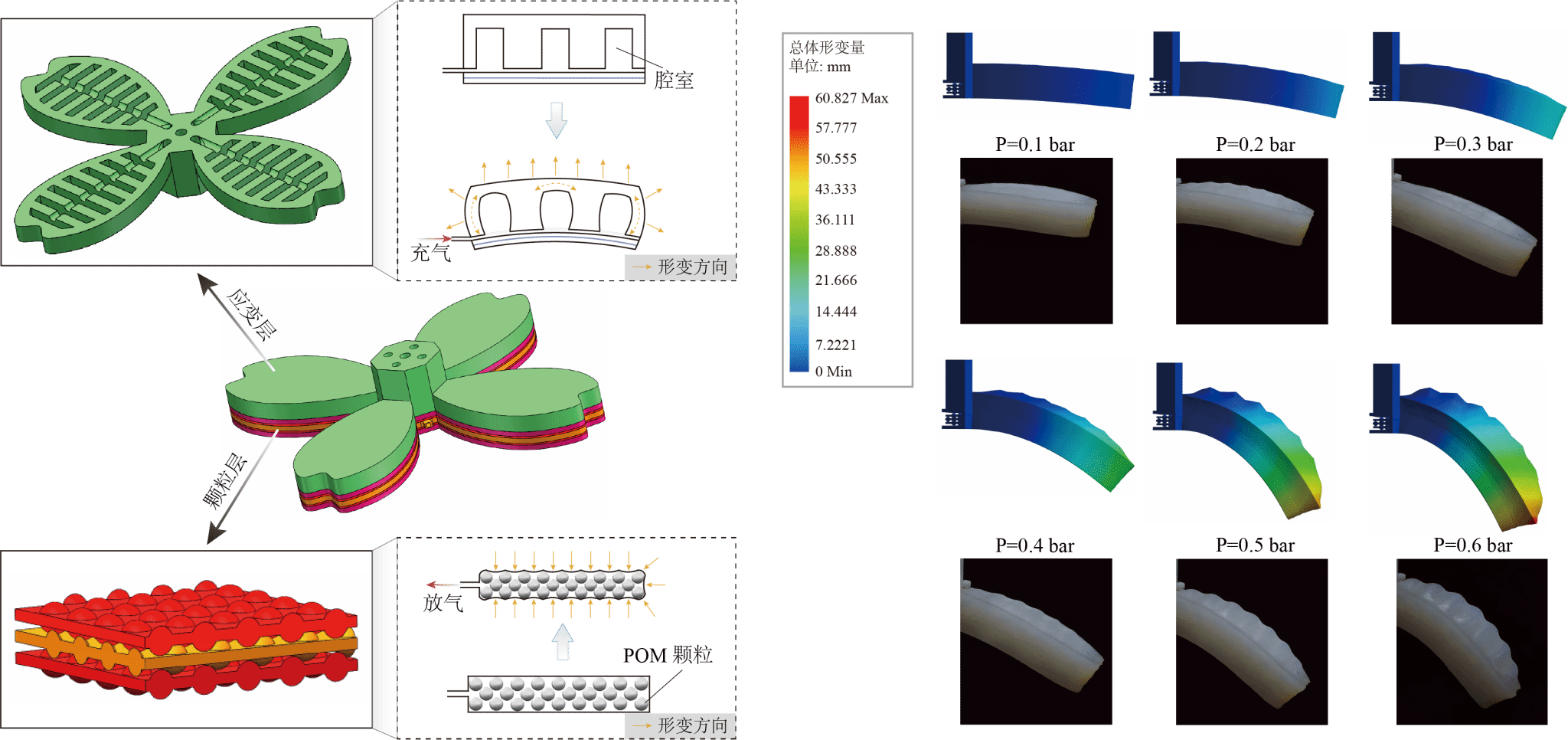
《机器人》是中国机器人领域的权威学术期刊之一,在国内机器人与智能系统研究方向具有重要影响力。期刊主要报道机器人学及相关交叉领域的最新研究成果,涵盖机器人机构与驱动、控制与规划、智能决策与学习、人机交互、仿生软体机器人以及机器人系统集成与应用等方向,注重基础理论创新与工程应用。研究成果《受植物启发的变刚度理疗执行器设计与分析》针对传统刚性理疗执行器适应性不足等问题,受植物界四叶草形态和行为特性的启发,设计了一种基于阻塞颗粒的三层卯榫结构变刚度层的理疗执行器。针对软材料迟滞特性导致的建模与控制问题,提出一种基于 P-I 建模和快速终端滑模的补偿控制策略,并搭建了变刚度结构、弯曲角度以及理疗力度的性能测试平台,验证其在应用过程中的控制精度。
上述研究成果不仅为智能理疗机器人领域的工程应用提供了理论支撑与方法创新,也集中展示了我院研究生在智能控制、仿生机器人技术方向的研究能力和探索精神。电气信息学院始终坚持以研究生培养质量为核心,持续强化科研反哺教学的育人成效,彰显了学院导师团队在引导研究生深度参与高水平科研、积极融入学术共同体以及构建高质量研究生培养体系方面的积极探索,有力支撑了“控制科学与工程”学科建设。
论文链接:
DOI: https://doi.org/10.1016/j.engappai.2025.112792
DOI: 10.13973j.cnki.robot.2005-1
(审稿:谢春晖)
