本网讯(通讯员 邹蝶 朱丽娜)近日,电气信息学院2023级硕士研究生邹蝶(导师:黄自鑫、黄丽坤)以第一作者,黄自鑫教授为通信作者,在期刊《International Journal of Robust and Nonlinear Control》发表题为《Time-Optimal and Jerk-Continuous Trajectory Planning and Tracking Control of Robots via High-Order Fully Actuated System Theory Approaches》的学术论文(DOI:10.1002/rnc.70435)。
《International Journal of Robust and Nonlinear Control》作为控制理论与工程领域具有较高影响力的老牌期刊,于1991年创刊,影响因子为3.4。该期刊旨在鼓励不确定线性和非线性系统的分析和设计技术的发展,致力于报道在调节和跟踪系统的理论和设计等相关领域基础研究与应用研究方面具有创新性和高水平的最新研究成果。
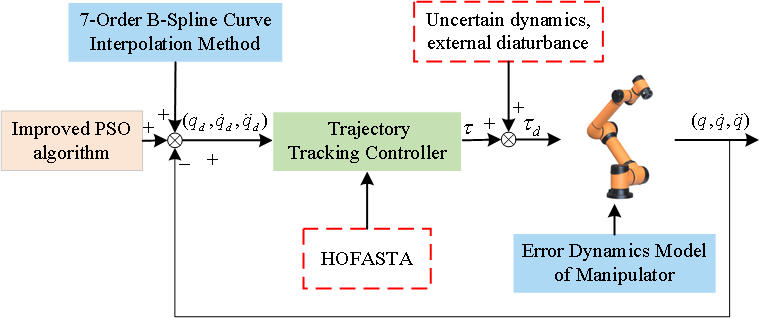
图1 HOFASTA 控制策略
多自由度机械臂作为机器人工程、智能制造、自动化与智能控制领域的核心研究对象,是实现高精度作业、柔性协作及复杂环境自主操作的关键装备,具有重要的理论研究价值与工程应用意义。本文提出了一种创新的轨迹规划算法和跟踪控制策略,该策略能够确保机器人的连续运动,并最大限度地减少时间消耗,同时实现精确的轨迹跟踪。首先,建立了系统的运动学模型和动力学模型,并使用等价变换将动力学模型转换为一个高阶全驱动系统模型。随后,采用7阶B样条曲线插值法在关节空间内构建脉动连续的插值轨迹;以最短轨迹运动时间为优化目标,将轨迹曲线与改进的粒子群优化算法相结合进行优化,优化后的轨迹相比传统粒子群算法,运动时间缩短了27.2%。在轨迹跟踪控制方面,通过高阶全驱系统理论方法,设计了一款实用的控制器。对比实验表明,本文所采用的高阶全驱系统方法(HOFASTA),在轨迹跟踪精度与突加负载扰动下的鲁棒性方面,均优于传统的非奇异快速终端滑模控制(NFITSMC)和模糊PID(FPID)控制器如图2。
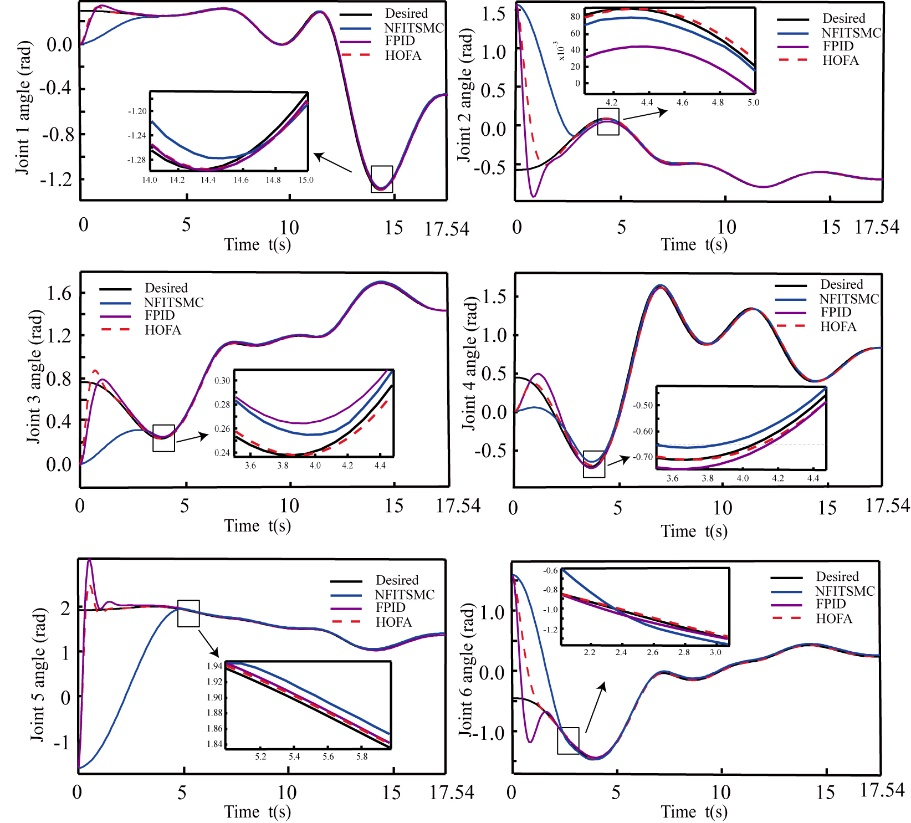
图2 机械手各关节1至6的轨迹跟踪曲线
电气信息学院以立德树人为根本,以科研创新与实践赋能为抓手,深度对接国家战略需求,引领师生勇攀科技前沿、深耕创新研究,持续构建高水平人才培养体系,助力学科高质量跨越式发展。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/rnc.70435
论文信息:Die Zou, Likun Huang, Wei Wang, Hao Liu, Zixin Huang*. Time-Optimal and Jerk-Continuous Trajectory Planning and Tracking Control of Robots via High-Order Fully Actuated System Theory Approaches, International Journal of Robust and Nonlinear Control, 2026, DOI: 10.1002/rnc.70435
(审稿:谢春晖)
